Applied Control Systems 1: autonomous cars: Math + PID + MPC
Loại khoá học: Math
Modeling + state space systems + PID + Model Predictive Control + Python simulation: lateral control for autonomous cars
Mô tả
The world is changing! The technology is changing! The advent of automation in our societies is spreading faster than anyone could have anticipated. At the forefront of our technological progress is autonomy in systems. Self driving cars and other autonomous vehicles are likely to be part of our every day lives. How would you like to understand and be able design these autonomous vehicles? How would you like to understand Mathematics behind it?
Welcome! In this course, you will be exposed to one of the most POWERFUL techniques there are, that are able to guide and control systems precisely and reliably.
You are going to DESIGN, MASTER and APPLY:
mathematical models in the form of state-space systems and equations of motion
a PID controller to a simple magnetic train that needs to catch objects that randomly fall from the sky
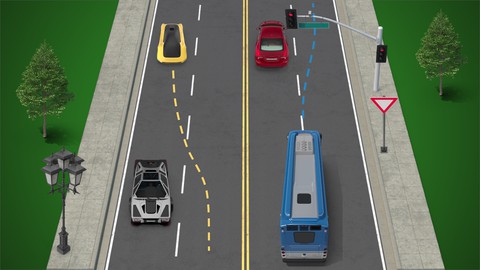
a Model Predictive Controller (MPC) to an autonomous car in a simple lane changing maneuver on a straight road at a constant forward speed.
You will LEARN the fundamentals and the logic of Modelling, PID and MPC that will allow you to apply it to other systems you might encounter in the future.
You need 3 things when solving an Engineering problem: INTUITION, MATHEMATICS, CODING! You can't choose - you really need them all. After this course, you will master Modelling, PID and MPC in all these 3 ways. That's a promise!
I'm very excited to have you in my course and I can't wait to teach you what I know.
Let's get started!
Bạn sẽ học được gì
mathematical modelling of systems
reformulating models into state-space equations
applying a PID controller to systems (simple magnetic train catching objects)
applying Model Predictive Control (MPC) to systems (autonomous car: lane changing maneuvers)
Yêu cầu
- Basic Calculus: Functions, Derivatives, Integrals
- Vector-Matrix multiplication
Nội dung khoá học
Viết Bình Luận
Khoá học liên quan












Đăng ký get khoá học Udemy - Unica - Gitiho giá chỉ 50k!
Get khoá học giá rẻ ngay trước khi bị fix.
Đánh giá của học viên
Bình luận khách hàng