GNSS GPS IMU INS Sensors - for ADAS and Autonomous Vehicles
Loại khoá học: Engineering
You will learn GNSS + INS sensors and related correction technologies that are highly used in ADAS and AD development
Mô tả
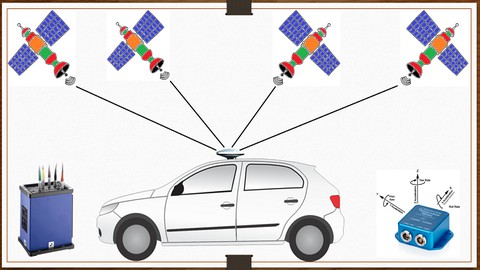
GNSS (Global Navigation Satellite System), and GPS (Global Position System) with INS (Inertial Navigation System) are highly used in ADAS and Autonomous driving development. Hence, it is necessary and very useful, to know the foundation of this group of sensors and related technologies, if you are working or aiming to work in this industry.
What will you learn after completing this course (with 10 hours of video lectures)?
Deeply understanding GNSS technology including signal processing, pseudo-range calculation, trilateration, GNSS errors, different ways to overcome these errors, various types of coordinate systems used in GNSS technology, latitude and longitude, different ways to represent them and their inter-conversions, NMEA-0183 message structures for GPS measurement (used by many sensors), and how to decode them.
Understand each correction method - DGNSS, DGPS, SBAS, GBAS, RTK, and PPP that increases the accuracy of GNSS measurement from a few metres to a few centimetres. (Almost all the industrial GNSS sensors use one or more of these technologies to improve their accuracy). Especially nowadays RTK (Real Time Kinematic) is very popular.
Deeply understand IMU (Inertial Measurement Unit), and the working of accelerometer, gyroscope and magnetometer sensors that make INS (Inertial Navigation System) - an indispensable part of a high-quality GNSS device used for ADAS and AD development.
Deep dive into AHRS (Attitude and Heading reference system), GNSS-aided INS technology and Dual GNSS-aided INS technology along with some case studies (taken from research papers)
Hands-on with low-cost GPS and IMU sensor together with Raspberry Pi 4 using Python-based programming. Here you will learn to read GPS location and IMU data in real time.
How this course help you in your career building?
If you are working in an industry/research institute, you will gain sufficient foundation to work with GNSS + INS devices in your ongoing or upcoming ADAS and AD development projects. You will also be able to understand various terms and technologies in this field to have active discussions with your team (very useful for project managers).
If you are studying, then you will gain sufficient knowledge to apply it in your school/college projects, as well as in your exams.
Note: This course focuses more on understanding the concepts and provides insights into various technologies in this domain hence programming is intentionally kept to a minimum.
Disclaimer: All the reference videos taken from various sources are only used for educational purposes and there is no intention to infringe copyright.
Bạn sẽ học được gì
You will learn GNSS (Global Navigation Satellite System) and GPS in detail including all the necessary concepts required to understand it.
You will learn various GNSS based correction methods like DGNSS, DGPS, SBAS, GBAS, RTK, PPP in detail that are used widely in ADAS and AD development
You get deep understanding of accelerometer, gyroscope and magnetometer sensors that forms INS (Inertial Navigation System)
You will learn about GNSS + INS fused sensor, and dual GNSS + INS fused sensor - very common sensor use in ADAS and AD development
You will get hands on with low cost GPS sensor, and IMU sensor using raspberry pi 4 and python to read real-time data
Yêu cầu
- Computer with internet connection
- Motivation to study and learn new technology
- (optional) low cost raspberry pi and GPS, IMU sensor for hands on practice.
Nội dung khoá học
Viết Bình Luận
Khoá học liên quan












Đăng ký get khoá học Udemy - Unica - Gitiho giá chỉ 50k!
Get khoá học giá rẻ ngay trước khi bị fix.
Đánh giá của học viên
Bình luận khách hàng